将 paxos 和 raft 统一到一个协议下: abstract-paxos
本文链接: https://blog.openacid.com/algo/abstract-paxos/
前言(客套话, 但会增加仪式感)
之前写了一篇 paxos的直观解释 , 用简单的语言描述了 paxos 的工作原理, 看过的朋友说是看过的最易懂的paxos介绍, 同时也问我是否也写一篇 raft 的. 但 raft 介绍文章已经很多很优质了, 感觉没什么可写的, 就一直拖着.
后来想起来, 在分布式岗的面试中, 会经常被问到 raft 和 paxos 有什么区别, 虽然可能会惹恼面试官, 但我会说: 没区别. 今天介绍一个把 paxos 和 raft 等统一到一起的分布式一致性算法 abstract-paxos, 解释各种分布式一致性算法从 0 到 1 的推导过程. 算是填了 raft 的坑, 同时在更抽象的视角看 raft, 也可以很容易看出它设计上的不足和几个优化的方法.
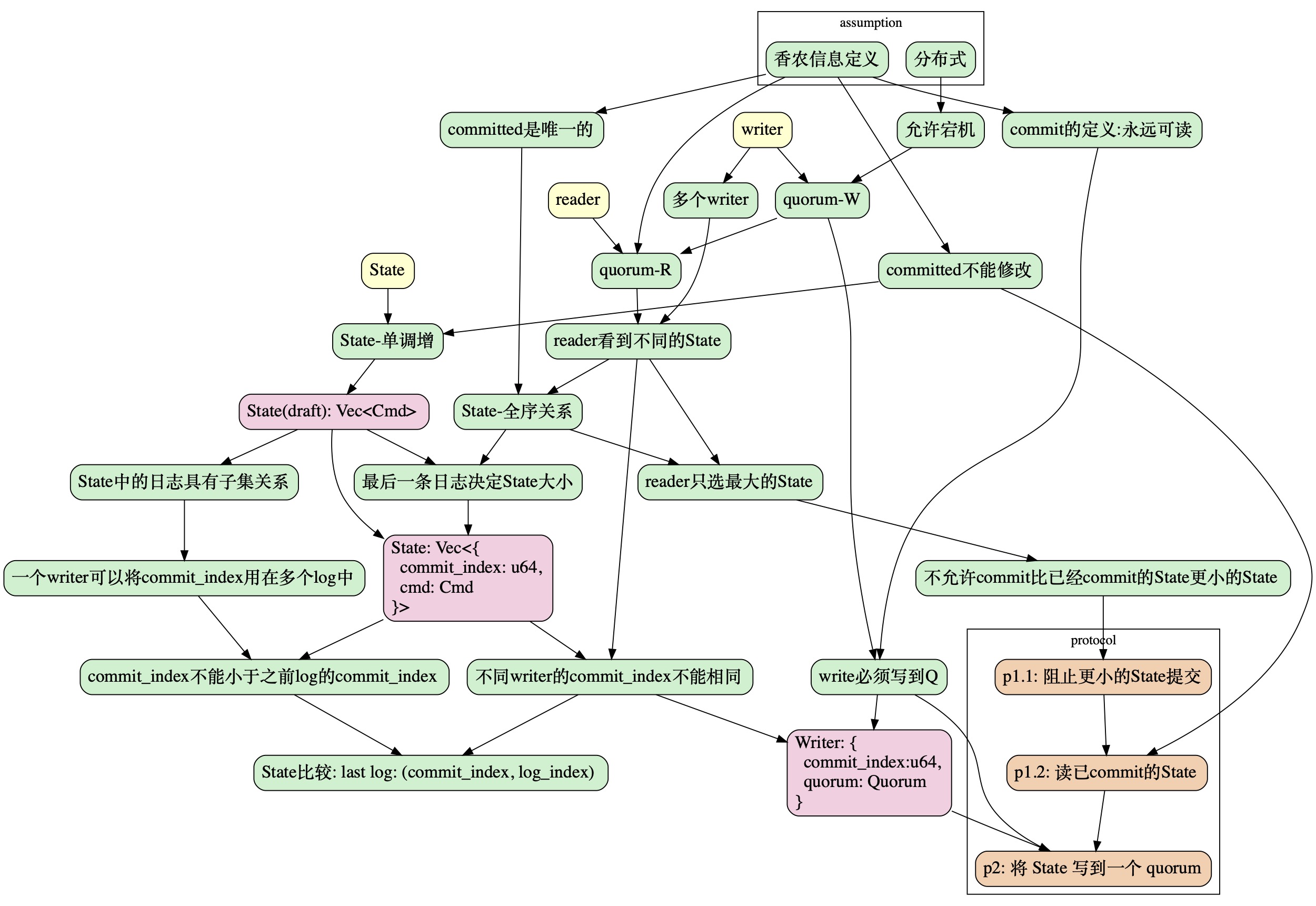
为了清楚的展现分布式一致性协议要解决的问题, 我们将从 0 开始, 即从 2 个基本需求: 技术爆炸和猜疑链 信息确定 和 分布式 开始, 推导出所有的分布式强一致协议的统一形式, 然后再把它特例化为 raft 或 paxos.
本文的整个推导过程顺着以下过程, 从 assumption 开始, 最终达到 protocol:
本文结构
- 提出问题
- 协议推导
- 定义 commit
- 定义 系统状态(State)
- 协议描述
- 工程实践
- 成员变更
- 使用 abstract-paxos 描述 paxos
- 使用 abstract-paxos 描述 raft
问题
从我们要解决的问题出发: 实现一个 分布式 的, 强一致的 存储 系统. 存储系统是存储信息的, 我们首先给出信息和分布式存储的定义:
香农信息定义
香农信息理论定义: 信息是用来消除随机不定性的东西.
具体来说, 对某个信息的读操作, 每次得到的内容应该都是唯一的,确定的.
这个定义将贯穿本文, 作为我们设计一致性协议的最根本的公理.
分布式存储
-
存储系统可以看做一个可以根据外部命令(Cmd) 改变系统状态(State) 的东西. 例如一个 key-value 存储,
set x=1或set x=y+1都可以看做一个 Cmd. -
而 分布式 则表示 存储系统 由多个节点(node)组成(一个node可以简单的认为是一个进程), 存储系统的操作者是多个并发的写入者(writer)和读取者(reader).
-
而一个可靠的 分布式 也意味着它必须 允许宕机: 它必须能容忍部分节点宕机还能正常工作.
所以它必须有 冗余, 即: 每个节点存储一个 State 的副本, 而我们需要的分布式一致性协议的目的, 就是保证对外界观察者(reader)能够提供保证 香农信息定义 的 State 的信息.
系统要提供在 writer 或 reader 只能访问到部分节点时系统也能工作, 这里的 部分节点在分布式领域一般定义为一个 quorum:
Quorum
一个 quorum 定义为一个节点(node)集合. e.g. HashSet<NodeId>.
在这个系统中, 分布式 的特性要求 writer 只需能联系到一个 quorum 就可以完成一个信息的写入, 即, 实现 quorum-write. 而 reader 只需要联系到一个 quorum 就可以确定的读取到 信息, 即实现 quorum-read.
因为 writer 写入的信息 reader 必须能读到, 所以任意2个 quorum 必须有交集:
大部分时候, 一个 quorum 都是指 majority, 也就是多于半数个node的集合. 例如
{a,b}, {b,c}, {c,a}是集合{a,b,c}的3个 quorum.
如果 任何一个 reader 都能通过访问一个 quorum 来读到某个数据, 那么这条数据就满足了 香农信息定义 , 我们称这条数据为 commit 的.
Commit
根据 香农信息定义, 如果写入的数据一定能通过某种方法读取到, 则认为它是 committed.
如果某个数据有时能读到有时不能, 它就不是一个 信息.
不确定读的例子
例子1: 读到不确定的结果
例如下面3个 node N1,N2,N3 的 例子1,
N1存储了[x,y],N3存储了[z],
使用 quorum-read 去读的时候, 有时能得到 [x,y] (访问 N1,N2 ),有时能得到 [z] (访问 N2,N3).
所以 [x,y] 和 [z] 在这个系统中都 不是信息, 都不是 commit 完成的状态.
N1: [x,y] | [x,y]
N2: [] | |
N3: [z] | [z]
--- 例子1 ---
例子2: 总能读到的结果
而像以下这个 例子2, 一次 quorum-read 不论落到哪2个 node 上, 都能看到 [z].
所以 [z] 在这个系统中有机会成为一个 信息.
这时还不能确定 [z] 是一个信息, 因为这里如果 reader 访问 N1,N2, 还涉及到是选 [x,y] 还是选 [z] 作为系统当前的状态的问题, 也就是说读取的结果还不能保证 唯一. 后面继续讨论.
N1: [x,y] | [x,y] or [z]
N2: [z] | |
N3: [z] | [z]
--- 例子2 ---
因此, 我们就得到了在一个多副本的存储系统中 commit 完成的条件:
- commit-写quorum: 以保证任何 reader 都可读到.
- commit-唯一: 以保证多个 reader 返回相同的结果.
- commit后不能修改: 以保证多次读返回同样的结果.
我们先解释这几个条件, 接着讨论如何设计一个 commit 的协议来满足这几个条件, 从而达到一致性.
commit-写quorum
一个数据必须有机会被 reader 见到: 即一个数据已经写到一个 quorum 中: commit-写quorum.
commit-唯一
这里 唯一 是指, 在 可见 的基础上, 增加一个 唯一确定 的要求:
例如在上面的 例子2 中, 如果 reader 一次读操作访问到 N1, N2 这2个 node, 那么它收到的看到的2个 State 的副本分别是 [x,y] 和 [z], 这2个 State 的副本都是 可见 的, 但作为一个存储系统, 任何一个 reader 都必须选择同样的 State 作为当前系统的 State (否则违反 香农信息定义 的消除不确定性的原则).
所以我们对读 操作还要求 reader 能有办法在所有 可见 的副本中唯一确定的选择一个 State, 作为 读 操作的结果.
commit后不能修改
香农信息定义 要求一个 commit 完成的 State 必须永远可被读到: 即要求 commit 的 State 不能被覆盖和修改, 只能 增加.
State 不能被修改有点反直觉, 因为一般的存储系统, 先存储了
x=1, 还可以修改为x=2. 看起来是允许修改的.这里可以这样理解:
经历了
x=1,再到x=2的一个 State ([x=1, x=2]), 跟直接到x=2的 State ([x=2])是不同的. 这个不同之处体现在: 可能有个时间点, 可以从第一个 State 读出x=1的信息, 而第二个 State 不行.
常见的 State 定义是: 一个 Cmd 为元素的, 只允许 append 的 list: Vec<Cmd>.
这也就是一个记录变更操作(Cmd)的日志(log), 或称为 write-ahead-log(WAL). 而系统的 State 也由 WAL 唯一定义的.
在一个典型的 WAL + State Machine 的系统中(例如 leveldb ), WAL 决定了系统状态(State), 如这3条log: [set x=1, set x=2, set y=3]. 而平常人们口中的 State Machine, 仅仅是负责最终将整个系统的状态呈现为一个 application 方便使用的形式, 即一般的HashMap的形式: {x=2, y=3}.
所以在本文中, WAL 是真实的 State, 我们这里说的不能修改, 只能追加, 就是指 WAL 不能修改, 只能追加. 本文中我们不讨论 State Machine 的实现.
如果把存储系统的 State 看做是一个集合, 那么它必须是一个只增的集合:
State
本文的目的仅仅是来统一 paxos 和 raft, 不需要太复杂, 只需把 State 定义为一个只能追加的操作日志:
struct State {
log: Vec<Cmd>,
}
log 中的每个 entry 是一个改变系统状态的命令(Cmd).
这是 State 的初步设计, 为了实现这个一致性协议, 后面我们将对 State 增加更多的信息来满足我们的要求.
根据 commit-写quorum 的要求, 最终 State 会写到一个 quorum 中以完成 commit, 我们将这个过程暂时称作 phase-2. 它是最后一步, 在执行这一步之前, 我们需要设计一个协议, 让整个 commit 的过程也遵守:
- commit-唯一,
- commit后不能修改
的约束.
首先看如何让 commit 后的数据 唯一, 这涉及到 reader 如何从 quorum 中多个node返回的不同的 State 副本中选择一个作为读操作的最终结果:
reader: 找出没有完成 commit 的 State 副本
根据 香农信息定义 , 已经 commit 的 State 要求一定能被读到, 但多个 writer 可能会(在互不知晓的情况下)并发的向多个 node 写入 不同 的 State.
写入了 不同 的 State 指, 两个 State: s₁, s₂, 如果
s₁ ⊆ s₂和s₂ ⊆ s₁都不满足, 那么只有一个是可能被 commit 的. 否则就产生了信息的丢失.
而当 reader 在不同的 node 上读到2个不同的 State 时, reader 必须能排除其中一个肯定没有 commit 的 State, 如 例子2 中描述问题.
即, commit-唯一 要求: 两个 非包含关系 的 State 最多只有一个是可能 commit 状态的. 并要求2个 State 可以通过互相对比, 来排除掉其中一个肯定不是 commit 的 State, 这表示 State 之间存在一个全序关系: 即任意2个 State 是可以比较大小的, 在这个大小关系中:
- 较大的是可能 commit 的,
- 较小的一定不是 commit 的.
State 的全序关系
State 的 全序关系 来表示 commit 的有效性, 但到目前为止, State 本身是一个操作日志, 也就是一个 list, list 之间只有一个偏序关系, 即包含关系. 互不包含的2个 list 无法确定大小关系.
例如, 如果在2个节点上分别读到2个log:
[x, y, z]和[x, y, w], 无法确认哪个是可能 commit 的, 哪个是一定没有 commit 的:x --> y --> z `--> w
所以 State 必须具备更多的信息让它能形成全序关系.
并且这个全序关系是可控的: 即, 对任意一个 State, 可以使它变得比任何已知 State 大. 否则, writer 在试图 commit 新的数据到系统里时将无法产生一个足够大的 State 让 reader 去选它, 导致 writer 无法完成 commit.
给 State 添加用于排序的信息
例如下面 例子3 中, 如果每个 node 都为其 State 增加一个序号(在例子中的角标位置),
那么reader 不论联系到哪2个节点, 都可以确定选择序号更大的[y] 作为读取结果, 这时就可以认为[y] 是一个信息了.
N1: [x,y]₂
N2: [y]₅
N3: [y]₅
--- 例子3 ---
而 commit后不能修改 的原则要求系统所有的修改, 都要基于已 commit 的 State,
所以当系统中再次 commit 一个数据后可能是在[y]₅ 之上追加[z,w]:
N1: [x,y]₂
N2: [[y]₅,z,w]₇
N3: [[y]₅,z,w]₇
--- 例子4 ---
为了实现上述逻辑, 一个简单的实现是 让最后一个 log 节点决定2个 State 之间的大小关系.
于是我们可以对 State 的每个 log 节点都需要加入一个 偏序关系 的属性 commit_index (本文为了简化描述, 使用一个整数)来确定 State 的全序关系:
struct State {
log: Vec<{
commit_index: u64,
cmd: Cmd
}>,
}
在后面的例子中, 我们将 commit_index 写成每条 log 的下标的形式, 例如
vec![
{commit_index: 3, cmd: x},
{commit_index: 5, cmd: y},
]
将表示为:
[x₃, y₅]
同时定义一个 method 用来取得一个 State 用于比较大小的 commit_index:
impl State {
pub fn commit_index(&self) -> u64 {
self.log.last().commit_index
}
}
commit_index 的值是由 writer 写入 State 时决定. 即 writer 决定它写入的 State 的大小.
如果两个 State 不是包含关系, 那么大小关系由 commit_index 决定.
writer 通过 quorum-write 写入一个足够大的 State, 就能保证一定被 reader 选择, 就完成了 commit.
这也暗示了:
-
非包含关系的2个 State 的
commit_index不能相同. 否则 State 之间无法确定全序关系. 即, 任意2个 writer 不允许产生相同的commit_index. -
同一个 writer 产生的 State 一定是包含关系, 不需要使用
commit_index去决定大小:对于2个包含关系的 State: sₐ ⊆ sᵦ, 显然对于 reader 来说, 应该选择更大的 sᵦ, 无需
commit_index来确定 State 的大小. 因此一个 writer 产生的 State, 允许多个 log 的commit_index相同. 并用 log 的长度确定大小关系.
这样我们就得到了State的大小关系的定义:
State-全序定义
两个 State 的顺序关系: 通过 commit_index和 log 长度确定, 即 比较2个 State 的: (s.commit_index(), s.log.len()).
上面提到,
commit_index是一个具有偏序关系的值, 不同类型的commit_index会将 abstract-paxos 具体化为某种协议或协议族, 例如:
- 如果
commit_index是一个整数, 那就是类似 paxos 的 rnd.- 而 raft 中, 与
commit_index对应的概念是[term, Option<NodeId>], 它是一个偏序关系的值, 也是它造成了 raft 中选举容易出现冲突.关于 abstract-paxos 如何映射为 paxos 或 raft, 在本文的最后讨论.
另一方面, 从 writer 的角度来说:
- 如果一个 writer 可以生成一个
commit_index使之大于任何一个已知的commit_index, 那么这时 abstract-paxos 就是一个活锁的系统: 它永远不会阻塞, 但有可能永远都不会成功提交. 例如 paxos 或 raft- 如果一个 writer 无法生成任意大的
commit_index, 那么它就是一个 死锁 的系统, 例如 2pc当然也可以构造
commit_index使 abstract-paxos 既活锁又死锁, 那么可以认为它是一个结合了 paxos 和 2pc 的协议.
有了 State 之间的全序关系, 然后再让 writer 保证 phase-2 写到 quorum 里的 State 一定是最大的, 进而让 reader 读取时都可以选择这个 State, 达到 香农信息定义 要求的信息确定性要求, 即commit-唯一 的要求, 完成 commit:
下面来设计协议, 完成这一保证:
协议设计
现在我们来设计整个协议, 首先 有一个 writer w,
w 最终 commit 的操作是在 phase-2 将 State 写到一个quorum.
writer 的数据结构定义为一个它选择的 quorum, 以及它决定使用的 commit_index:
struct Writer {
quorum: BTreeSet<NodeId>,
commit_index: u64,
}
因为 reader 读取时, 只选它看到的最大的 State 而忽略较小的. 所以如果一个较大的 State 已经 commit, 那么整个系统就不能再允许 commit 一个较小的 State, 否则会造成较小的 State 认为自己 commit 完成, 但永远不会被读到, 这就造成了信息丢失.
例如下面 例子5 中描述的场景, 如果最终写入 State 前不做防御, 那么是无法完成 commit 的: 假设有2个 writer
w₁,w₂同时在写它们自己的 State 到自己的 quorum:
- t1 时间
w₁将[y₅]写到N2, N3,- t2 时间
w₂将[x₁,y₇]写到了N1.那么当一个 reader 联系到
N1, N2进行读操作时, 它会认为[x₁,y₇]是 commit 完成的, 而真正由w₁commit 的数据就丢失了, 违背了 香农信息定义.N1: [x₁,y₇] N2: [y₅] N3: [y₅] ----+-------+-----------------------------------------> time t1 t2 --- 例子5 ---
所以: writer 在 commit 一个 State 前, 必须阻止更小的 State 被 commit. 这就是 phase-1 要做的第一件事:
Phase-1.1 阻止更小的 State 被 commit
假设 writer w₁ 要写入的 State 是 s₁,
在 w₁ 将 s₁ 写到一个quorum 前, 整个系统必须阻止小于 s₁ 的 State 被 commit.
因为不同的 writer 不会产生同样的 commit_index .
所以整个系统只需阻止更小的 commit_index 的 State 被 commit:
为达到这个目的, 在这一步,
首先通知 w₁.quorum 中的每个节点: 拒绝所有其他 commit_index 小于 w₁.commit_index 的 phase-2 请求.
于是我们基本上可以确定 node 的数据结构, 它需要存储 phase-2 中真正写入的 State,
以及 phase-1.1 中要拒绝的 commit_index:
struct Node {
commit_index: u64,
state: State,
}
在后面的例子中, 我们将用一个数字前缀表示 node 中的
commit_index, 例如:Node{ commit_index: 7, state: State{ log: vec![ {commit_index: 3, cmd: x}, {commit_index: 5, cmd: y}, ] } }将表示为:
7,[x₃, y₅]
一个直接的推论是, 一个 node 如果记录了一个 commit_index , 就不能接受更小的 commit_index ,
否则意味着它的防御失效了: Node.commit_index 单调增.
如果 writer 的 phase-1.1 请求没有被 quorum 中全部成员认可, 那么它无法安全的进行 phase-2, 这时只能终止.
最后我们整理下 phase-1.1 的流程:
struct P1Req {
// The commit_index under which a node should refuse.
commit_index: u64,
}
struct P1Reply {
// The commit_index of a node
commit_index: u64,
}
w.commit_index
w ------------------------> N1, N2, N3
------
w <------------------------ N1, N2, N3
N1.commit_index ------
N2.commit_index
每个 node 在 P1Reply 中返回自己之前保存的 commit_index, writer 拿到 reply 后跟自己的commit_index 对比, 如果 w.commit_index >= P1Reply.commit_index, 表示 phase-1.1 成功.
完成 phase-1.1 后, 可以保证没有更小的 State 可以被 commit 了.
然后, 为了满足 commit后不能修改 的原则,
还要求 s₁ 必须包含所有已提交的, commit_index 小于 s₁.commit_index() 的所有 State:
Phase-1.2 读已完成 commit 的 State
因为 commit 的条件之一是将 State 写入一个 quorum ,
所以 w₁ 询问 w₁.quorum, 就一定能看到小于 w₁.commit_index 的, 已 commit 的其他 State.
这时 writer 是一个 reader 的角色(如果遇到大于 w₁.commit_index 的 State, 则当前 writer 是可能无法完成提交的, 应终止).
且读过某个 node 之后, 就不允许这个 node 再接受来自其他 writer 的, 小于 w₁.commit_index 的 phase-2 的写入.
以避免读后又有新的 State 被 commit, 这样就无法保证 w₁ 写入的State能包含所有已 commit 的 State.
w₁ 在不同的节点上会读到不同的 State , 根据 State 的全序的定义, 只有最大的 State 才可能是已 commit 的(也可能不是, 但更小的一定不是).
所以 w₁ 只要选最大的 State 就能保证它包含了所有已 commit 的 State.
在最大 State 的基础上, 增加 w₁ 自己要写的内容.
最后进行 phase-2 完成 commit .
phase-1.1 跟 phase-1.2 一般在实现上会合并成一个 RPC, 即 phase-1.
Phase-1
Phase-1: Data
struct P1Req {
// The commit_index under which a node should refuse.
commit_index: u64,
}
struct P1Reply {
// The commit_index of a node
commit_index: u64,
state: State,
}
Phase-1: Req

Phase-1: Reply

Phase-1: Handler
impl Node {
fn handle_phase_1(&mut self, p1_req: P1Req) {
let p1_reply = P1Reply{
commit_index: self.commit_index
state: self.state,
};
self.commit_index = max(self.commit_index, p1_req.commit_index());
return p1_reply;
}
}
Phase-2
最后, 保证了 s₁ 当前最大, 和 commit后不能修改 这两个条件后, 第2阶段, writer 就可以安全的写入一个 s₁ 完成 commit.
如果 phase-2 完成了, 则表示 commit 一定成功了, 任何一个 reader 都能读到唯一确定的 State s₁(除非有更大的 State 被写入了).
反之, 如果有其他 writer 通过 phase-1 阻止了 w₁.commit_index 的写入,
那么 w₁ 的 phase-2 就可能失败, 这时就退出 commit 过程并终止.
这里有一个学习分布式系统时经常提出的问题:
Q:
因为在 phase-1 中 w 已经阻止了所有小于
w.commit_index的 State 的提交, phase-2 是否可以写入一个小于w.commit_index的 State?A:
不可以, phase-2 写入的 State 的
commit_index()跟w.commit_index相等时才能保证安全, 简单分析下:
显然要写的
s₁.commit_index()不能大于w₁.commit_index, 因为 phase-1.1 没有保护大于w₁.commit_index的 State 的写入.虽然在 phase-1 阶段, 系统已经阻止了所有小于
s₁.commit_index()的其他 State 的 phase-2 写入, 如果w₁写的 State 的s_1.commit_index()小于w.commit_index, 那么系统中可能存在另一个稍大一点的 State (但没有 commit , 导致 reader 不认为s₁是 commit 的.例如,
- 一个 writer w₅ 在 t1 时间完成了 phase-1, 在 t2 时间 phase-2 只写入了
N1;- 然后另一个 writer w₆ 在 t3 时间完成了 phase-1, phase-2 只写入了一个较小的
commit_index=4的 State.那么某个 reader 如果通过访问
N1,N2读取数据, 会认为N1上的[x₅]是 commit 的, 破坏了 香农信息定义 .N1: 5,[] 5,[x₅] N2: 5,[] 6,[] 6,[y₄] N3: 6,[] 6,[y₄] ----+-------+---------+----------+---------> time t1 t2 t3 t4 --- 例子6 ---
所以必须满足: s₁.commit_index() == w₁.commit_index
这时, 只要将 State 写入到 w₁.quorum, 就可以认为提交.
对应每个 node 的行为是:
在每个收到 phase-2 请求的节点上, 如果 node 上没有记录拒绝 commit_index 以下的 phase-2 请求, 就可以接受这笔写入.
一个推论: 一个节点如果接受了 commit_index 的写入,
那么同时它应该拒绝小于 commit_index 的写入了. 因为较小的 State 一定不是 commit 的, 如果接受, 会造成信息丢失.
Phase-2: data
struct P2Req {
// The commit_index under which a node should refuse.
commit_index: u64,
state: State,
}
struct P2Reply {
// The commit_index of a node
commit_index: u64,
}
-
和 phase-1 类似, 一个 node 返回它自己的
commit_index来表示它是否接受了 writer 的 phase-2 请求. -
在
P2Req中, 如果state是完整的,commit_index总是与state.commit_index()一样, 可以去掉; 这里保留是因为之后将会讨论到的分段传输: 每个请求只传输State的一部分, 这时就需要额外的P2Req.commit_index.
Phase-2: Req

Phase-2: Reply

Phase-2: Handler
impl Node {
fn handle_phase_2(&mut self, p2_req: P2Req) {
let p2_reply = P2Reply{
commit_index: self.commit_index
};
if p2_req.commit_index >= self.commit_index {
self.state.update(p2_req.state);
self.commit_index = max(self.commit_index, p2_req.commit_index);
}
return p2_reply;
}
}
也就是说 phase-2 不止可能修改 Node.state, 同时也会修改 Node.commit_index.
这里也是一个学习分布式容易产生误解的地方, 例如很多人曾经以为的一个paxos的bug: paxos-bug.
这里也很容易看出为何在 raft 中必须当前 term 复制到 quorum 才认为是 commit 了.
可重复的 phase-2
要保证写入的数据是 commit 的, 只需保证写入一个 quorum 的 State 是最大的即可. 所以 writer 可以不断追加新的日志, 不停的重复 phase-2.
Writer 协议描述
最后将整个协议组装起来的是 writer 的逻辑, 如前所讲, 它需要先在一个 quorum 上完成 phase-1 来阻止更小的 State 被 commit, 然后在 quorum 上完成 phase-2 完成一条日志的提交.
impl Writer {
write(&mut self, cmd: &Cmd) {
self.commit_index = next_unique();
let p1_replies: Vec<P1Reply> = send_p1(P1Req{
commit_index: self.commit_index
});
if !is_accepted_by_a_quorum(p1_replies) {
return error;
}
let max_state = p1_replies.iter().max();
let state = max_state.append_log(cmd);
state.log.last().commit_index = self.commit_index;
let p2_replies: Vec<P2Reply> = send_p2(state);
let committed = is_accepted_by_a_quorum(p2_replies);
return committed;
}
}
工程实现
Phase-2: 增量复制
这个算法的正确性 还需考虑工程上的方便,
到目前为止, 算法中对 State 的写都假设是原子的. 但在工程实现上, State 是一个很大的数据结构, 很多条 log
所以在 phase-2 传输 State 的过程中, 我们还需要一个正确的分段写的机制:
原则还是保证 香农信息定义 , 即: commit 的数据不丢失.
-
State 不能留空洞: 有空洞的 State 跟没空洞的 State 不同, 不能通过最后一条日志来确定其所在的 State 大小.
-
writer 在 phase-1 完成后可以保证一定包含所有已经 commit 的 State .
所以在一个接受 phase-2 的node 上, 它 Node.state 中任何跟 Writer.State 不同的部分都可以删除, 因为不一致的部分一定没有被 commit.
以下是 phase-2 过程中删除 N3 上不一致数据的过程:
W: p1[x₅,z₅,w₆] p2 p2 p2
N1: 5,[x₃,z₅] 6,[x₅,z₅] | | |
N2: 5,[] 6,[] v v v
N3: 4,[x₃,y₄] 4,[x₃,y₄] 5,[x₅,z₅] 6,[x₅,z₅,w₆]
----+----------+-------------+----------+----------+------------->
t0 t1 t2 t3 t4
--- 例子7 ---
-
t1 时刻, writer W联系到N1, N2完成phase-1,, 读到最大的State
[x₃,z₅], 添加自己的日志到最大State上:[x₃,z₅,w₆]. 这时系统中没有任何一个node的State是commit完成状态的, 一个reader可能选择[x₃,z₅]作为读取结果(访问N1,N2), 可能选择[x₃,y₄]作为读取结果(访问N2,N3).但这时一个State的子集:
[x₃]是commit完成的状态. -
t2 时刻, W向N3 复制了一段State:
[x₃], 它是N3本地日志的子集, 不做变化.这时reader还是可能读到不同的结果, 同样
[x₃]是commit完成的状态. -
t3 时刻, W向N3 复制了另一段State
z₅, 它跟N3本地State冲突, 于是N3放弃本地的一段与writer不一致的Statey₄, 将本地State更新为:[x₅,z₅]这时
[x₅,z₅]是commit完成状态. -
t4 时刻, W继续复制
w₆到N3, 这时[x₅,z₅,w₆]是commit完成状态.
Snapshot 复制
snapshot 复制跟 State 分段复制没有本质区别, 将 State 中的 log 从0到某一范围以压缩后的形式传输的到其他 node.
成员变更
为支持成员变更, 我们先加入下面这几个行为来支持成员变更操作:
- State 中某些日志(config日志)表示集群中的成员配置.
- State 中最后一个成员配置(config) 日志出现就开始生效.
- config日志与普通的日志写入没有区别.
config 定义一个集群的 node 有哪些, 以及定义了哪些 node 集合是一个 quorum.
例如一个普通的3成员集群的 config
[{a,b,c}], 它定义的 quorum 有{a,b} {b,c} {c,a}再如一个由2个配置组成的 joint config
[{a,b,c}, {x,y,z}]. 它定义的 quorum 集合是{a,b,c}的 quorum 集合跟{x,y,z}的 guorum 集合的笛卡尔积:{a,b, x,y} {a,b, y,z} {a,b, z,x} {b,c, x,y} {b,c, y,z} {b,c, z,x} {c,a, x,y} {c,a, y,z} {c,a, z,x}
然后, 我们对成员变更增加约束, 让成员变更的过程同样保证 香农信息定 的要求:
成员变更约束-1
首先, 显然有 2个相邻 config 的 quorum 必须有交集. 否则新配置启用后就立即会产生脑裂. 即:
在后面的讨论中我们将满足以上约束的2个 config 的关系表示为: cᵢ ~ cᵢ₊₁.
例如: 假设 State 中某条日志定义了一个 joint config: [{a,b,c}, {x,y,z}],
那么,
-
下一个合法的 config 可以是:
- uniform config
[{a,b,c}], - 或另一个 joint config
[{x,y,z}, {o,p,q}].
- uniform config
-
但不能是
[{a,x,p}], 因为它的一个 quorum{a,x}与 上一个 config 的 quorum[{b,c}, {y,z}]没有交集.
成员变更Lemma-1
对2个 config cᵢ ~ cⱼ,
以及2个 State Sᵢ 和 Sⱼ 如果 Sᵢ 和 Sⱼ 互相不是子集关系,
Sᵢ 在 cᵢ 上 commit 跟 Sⱼ 在 cⱼ 上 commit 不能同时发生.
成员变更约束-2
因为2个不同 writer 提出(propose)的 config 不一定 有交集,
所以为了满足 commit-唯一 的条件,
包含新 config 的日志要提交到一个新, 旧配置的 joint config 上.
即, cᵢ₊₁ 必须在 [cᵢ, cᵢ₊₁] 上 commit.
cᵢ₊₁ 之后的 State, 只需使用 cᵢ₊₁ 进行 commit.
但是, 当 writer 中断, 另一个 writer 看到 cᵢ₊₁ 时,
它不知道 cᵢ₊₁ 处于变更中间, 也就是说新的 writer 不知道现在的 commit 应该使用 [cᵢ, cᵢ₊₁], 它只使用 [cᵢ₊₁].
所以对 config 日志向 joint config 的 commit 分为两步:
- 先在旧配置上拒绝更小的 State 的提交, 再 propose 新配置.
根据 成员变更Lemma-1, 即, 至少将一个与
w.commit_index相同的 State commit 到cᵢ上. - 再 propose
cᵢ₊₁, 从日志cᵢ₊₁之后的日志开始, 都只需 commit 到cᵢ₊₁上.
最后总结:
成员变更的约束条件
- 上一个 config 在当前
commit_index上提交后才允许 propose 下一个配置. - 下一个配置必须跟最后一个已提交的配置有交集.
成员变更举例
-
raft 只支持以下的成员变更方式
c1→c1c2→c2→c2c3→c3…其中
c1c2指c1跟c2的 joint config, 例如:cᵢ:{a, b, c};cᵢcⱼ:[{a, b, c}, {x, y, z}].
-
abstract-paxos 可以支持更灵活的变更:
c1→c1c2c3→c3c4→c4.或回退到上一个 config:
c1c2c3→c1.
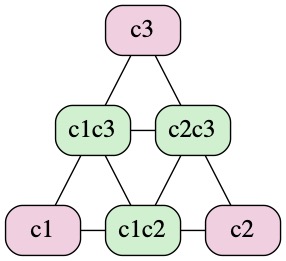
合法变更状态转换图示
下面的图示中简单列出了至多2个配置的 joint config 跟 uniform config 之间可转换的关系:
Variants
以上为 abastract-paxos 的算法描述部分. 接下来我们将看它是如何通过增加一些限制条件, absract-paxos 将其变成 classic-paxos 或 raft 的.
秒变 Paxos
- 限制 State 中的日志只能有一条, 那么它就变成 paxos.
- 不支持成员变更.
其中概念对应关系为:
| abstract-paxos | classic-paxos |
|---|---|
| writer | proposer |
| node | acceptor |
| Writer.commit_index | rnd/ballot |
| State.commit_index() | vrnd/vbal |
秒变 Raft
Raft为了简化实现(而不是证明), 有一些刻意的阉割:
commit_index 在 raft 里是 一个 偏序关系 的 tuple, 包括:
- term
- 和是否投票给了某个 Candidate:
struct RaftCommitIndex {
term: u64,
voted_for: VotedFor,
}
type VotedFor = Option<NodeId>;
其中 VotedFor 的大小关系(即覆盖关系: 大的可以覆盖小的) 定义是:
let a: VotedFor;
let b: VotedFor;
a > b iff
a.is_some() && b.is_none()
即, VotedFor 只能从 None 变化到 Some, 不能修改.
或者说, Some(A) 和 Some(B) 没有大小关系, 这限制了raft 选主时的成功几率. 导致了更多的选主失败冲突.
let a: RaftCommitIndex;
let b: RaftCommitIndex;
a > b iff
a.term > b.term
|| (a.term == b.term && a.voted_for > b.voted_for)
commit_index 在每条日志中的存储也做了简化, 先看直接嵌入后的结构如下:
struct RaftState {
log: Vec<{
commit_index: (Term, Option<NodeId>),
cmd: Cmd,
}>,
}
raft 中, 因为 VotedFor 的特殊的偏序关系的设计, 日志中 Term 相同则 voted_for 一定相同, 所以最终日志里并不需要记录voted_for, 也能用来唯一标识日志, State, 及用于比较 State 的大小. 最终记录为:
struct RaftState {
log: Vec<(Term, Cmd)>,
}
这样的确让 raft 少记录一个字段, 但使得其含义变得更加隐晦, 工程上也引入了一些问题, xp并不欣赏这样的作法.
但不否认 raft 的设计在出现时是一个非常漂亮的抽象, 主要在于它对 multi-paxos 没有明确定义的问题, 即多条日志之间的关系到底应该是怎样的, 给出了一个确定的答案.
概念对应关系:
| abstract-Paxos | raft |
|---|---|
| writer at phase-1 | Candidate |
| writer at phase-2 | Leader |
| node | node |
| Writer.commit_index | (Term,VotedFor) |
| State.commit_index() | Term |
成员变更方面, raft 的 joint 成员变更 算法将条件限制为只允许 uniform 和 joint 交替的变更: c0 -> c0c1 -> c1 -> c1c2 -> c2 ....
不难看出, raft 的 单步变更 算法也容易看出是本文的成员变更算法的一个特例.
Raft 的优化
abstract-paxos 通过推导的方式, 得出的一致性算法可以说是最抽象最通用的. 不像 raft 那样先给出设计再进行证明, 现在从上向下看 raft 的设计, 就很容易看出 raft 丢弃了哪些东西和给自己设置了哪些限制, 也就是 raft 可能的优化的点:
- 1, 一个term允许选出多个 leader: 将
commit_index改为 字典序, 允许一个 term 中先后选出多个 leader. - 2, 提前commit: raft 中 commit 的标准是复制本 term 的一条日志到 quorum. 这样在新 leader 刚刚选出后可能会延后 commit 的确认, 如果有较多的较小 term 的日志需要复制的话. 因此一个可以较快 commit 的做法是复制一段 State 时(raft 的 log), 也带上 writer 的
commit_index信息(即 raft leader 的term) 到每个 node, 同时, 对 State 的比较(即raft 的 log 的比较) 改为比较[writer.commit_index, last_log_commit_index, log.len()], 在raft 中, 对应的是比较[leader_term, last_log_term, log.len()]. - 3, 成员变更允许更灵活的变化: 例如
c0c1 -> c1c2.
其中1,3已经在 openraft 中实现(朋友说它是披着raft皮的paxos/:-)).
Reference:
-
可靠分布式系统-paxos的直观解释 : https://zhuanlan.zhihu.com/p/145044486
-
abstract-paxos : https://github.com/openacid/abstract-paxos
-
(Not a) bug in Paxos : https://github.com/drmingdrmer/consensus-bugs#trap-the-bug-in-paxos-made-simple
-
leveldb : https://github.com/google/leveldb
-
openraft : https://github.com/datafuselabs/openraft
-
Two phase commit : https://en.wikipedia.org/wiki/Two-phase_commit_protocol
本文链接: https://blog.openacid.com/algo/abstract-paxos/

留下评论